Januari 2023
Autonoom rijden draait om méér dan alleen de auto
Snelle datacommunicatie cruciaal

Autonoom rijden. Voor de een is het een negatieve ontwikkeling, want we mogen nooit meer zelf achter het stuur zitten. Voor anderen is dat juist het positieve aan deze trend: we hoeven nooit meer zelf achter het stuur te kruipen. Bij autonoom rijden wordt vaak gekeken naar de auto’s zelf. Dat is niet helemaal terecht, want het is juist vooral de omgeving van die auto die het zelfstandig rijden mogelijk maakt. En bij die technische IT- en verkeersinfrastructuur komt nogal wat kijken.
Bij autonoom rijden denken we vooral aan de auto’s van Google en Tesla. Deze auto’s hebben inmiddels de reputatie dat ze – op enkele incidenten na – redelijk moeiteloos hun weg door het verkeer weten te vinden. Met talloze radarsystemen, camera’s en andere sensoren ‘kijken’ zij om zich heen en maken continu inschattingen van het verkeer: moeten we afremmen of stoppen? Staat het stoplicht op rood of groen? Kunnen we een andere auto inhalen? Kunnen we bij de volgende zijstraat afslaan of mag dat niet?
Deze sensoren werken steeds beter. Daarnaast wordt ook het technisch beheer van autonoom rijdende voertuigen verder uitgebouwd. Het Duitse bandenleverancier Continental levert bijvoorbeeld al systemen waarmee de bandenspanning niet alleen continu wordt gemeten (dat gebeurt bij sommige luxere traditionele auto’s ook), maar waarbij een te lage bandenspanning wordt doorgegeven aan een servicestation. Daar wordt dit soort informatie gebruikt om te bepalen of de auto al of niet terug naar de garage moet komen voor onderhoud of reparatie.
Samenwerkende systemen
Als we een stapje terug zetten, zien we in feite twee systemen die samen het fenomeen autonoom rijden vormen. Dat is allereerst uiteraard de auto zelf vol met sensoren, die continu de omgeving van de auto in de gaten houden. Daarnaast hebben we natuurlijk te maken met de omgeving waarin de autonoom rijdende auto zich bevindt. Hier dienen tal van systemen aanwezig te zijn die niet alleen de auto van informatie voorzien, maar die tevens de situatie op een bepaald wegvak in de gaten houden. Bijvoorbeeld: het aantal auto’s en de snelheid waarmee zij zich voortbewegen. De sensoren die hiervoor worden gebruikt, scannen continu het wegvak, berekenen daaruit een aantal gegevens en stellen deze beschikbaar aan zowel de autonoom rijdende auto’s als aan de controlekamer en de daar aanwezige controlesystemen die verantwoordelijk zijn voor dit wegvak.
Om dit te kunnen realiseren is een volledige digitalisering van automobiliteit nodig. Applicaties die zijn geïnstalleerd op een mobiele computer – de autonoom rijdende auto – ‘praten’ hierbij met verkeersinstallaties en digitale systemen in de cloud. Dat is natuurlijk enigszins een versimpeling van de realiteit, maar het helpt om duidelijk te maken wat autonoom rijden gaat betekenen los van de auto zelf. Want dat autonoom rijden zonder aanvullende techniek niet mogelijk is, dat is wel duidelijk.
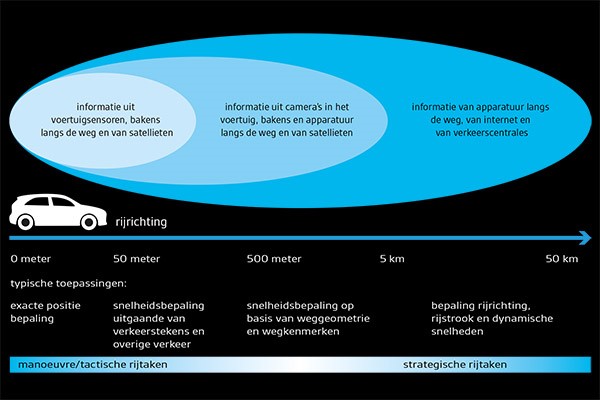
Om een beter beeld te krijgen van wat autonoom rijden aan infratechniek en achterliggende cloudservices vereist, is het belangrijk eerst te kijken naar welke informatie een zelfstandig rijdende auto nodig heeft om autonoom te kunnen rijden (figuur 1).
 1. Hoe bepaalt een zelfrijzende auto zijn positie?
1. Hoe bepaalt een zelfrijzende auto zijn positie?
Datacenters en edge nodig
Er is sprake van een splitsing in twee categorieën van taken of soorten informatie: dichtbij het voertuig (tactisch) en op grotere afstand (strategisch). Beide groepen van taken vragen om een continue stroom van data. Het uit al deze data berekenen van nuttige informatie over snelheden, afstanden tot obstakels, verkeersintensiteit en dergelijke gebeurt deels aan boord van de auto en deels ‘langs de weg’. Daarmee wordt bedoeld: in IT-faciliteiten die dichtbij de weg zijn geplaatst, ook wel ‘edge facilities’ genoemd. Hierbij gaat het dan om zaken zoals het supersnel bepalen van de exacte locatie van de auto en de posities en snelheden van andere auto’s in de directe omgeving. Dat moet in realtime gebeuren bij auto’s die vlakbij elkaar in de buurt met 100 km/uur rijden. Maar edge facilities hebben ook een duidelijke rol bij het doorgeven van de toestand van de weg. Denk aan metingen die vaststellen dat er veel regenwater op de weg ligt of dat de weg glad is vanwege lokale vorst. Of als plotsklaps een rijbaan wordt afgesloten omdat er een vrachtwagen met pech op de vluchtstrook staat.
Snelheid en met name ‘latency’ – de tijd tussen zenden en ontvangen van data – is hierbij cruciaal. Dat geldt bijvoorbeeld ook voor de snelheid waarmee een file die plotseling ontstaat, wordt vastgesteld en wordt doorgegeven.
Mobiliteitsexperts maken bij autonoom rijden onderscheid tussen twee soorten datacommunicatie:
• communicatie tussen twee auto’s ofwel ‘vehicle to vehicle’ (v2v),
• communicatie tussen een zelfstandig rijdende auto en de omliggende verkeerssystemen. Dit noemen zij ‘vehicle to infrastructure’-communicatie (v2i).
Voor v2i zijn datacenters nodig, evenals de edge facilities die zich langs het wegvak bevinden. Edge facilities verbeteren de latency en vervullen zo een belangrijke rol. De vraag is dus: hoeveel hebben we daarvan straks nodig en waar dan precies? Een vraag die waarschijnlijk pas in de praktijk exact kan worden beantwoord.
4G versus 5G
Terug naar de uitwisseling van data tussen autonoom voertuig en zijn omgeving. Deze communicatie gebeurt uiteraard met de hulp van draadloze communicatie. We zien nu al dat duurdere auto’s standaard zijn voorzien van 4G-verbindingen. Anders gezegd, zij hebben een 4G-simkaart aan boord waarmee een aantal taken kunnen worden geregeld: actuele verkeersinformatie ophalen (files, wegafsluitingen en dergelijke), de passagiers voorzien in streaming van audio enzovoort.
Voor dit soort relatief eenvoudige taken is 4G ruim voldoende. Bovendien helpen het huidige ‘traffic message channel’ voor verkeersinformatie en dab+ (digitale radio, de opvolger van FM-radio) voor audio ook mee. Hier zien we nog duidelijk het verschil tussen rijden met een mens als chauffeur en een zelfstandig rijdende auto. Momenteel heeft de chauffeur zelf controle over het voertuig en is dus zelf alert op zijn of haar omgeving. Daarom is het minder belangrijk dat het ontstaan van een file niet in realtime in het navigatiesysteem zichtbaar wordt. De chauffeur ziet immers zelf de remlichten gaan branden als voorgangers langzamer gaan rijden en ziet zelf de matrixborden boven de snelweg aan gaan.
Navigatie is nu dan ook nog duidelijk een hulpsysteem. Zonder gebruik van een navigatiesysteem kunnen we nog steeds veilig van A naar B rijden. Bij autonoom rijden is de rol van navigatie – of beter gezegd: plaatsbepaling in relatie tot de directe omgeving – heel anders. Is de autonoom rijdende auto niet in realtime op de hoogte van het feit dat de voertuigen voor hem langzamer gaan rijden, dan kan het besturingssysteem niet adequaat reageren op de nieuwe situatie.
4G voldoet dus niet voor autonoom rijden, maar 5G (grotendeels) wel (figuur 2). Een groot verschil tussen beide is de download-snelheid: 1 Gbps voor 4G versus 20 Gbps voor 5G. Zo mogelijk nog belangrijker is het verschil in latency: 60 - 98 ms bij 4G tegenover minder dan 5 ms voor 5G. Daarmee komt 5G dichtbij het niveau van realtime. Laten we het voor nu maar even ‘near-realtime’ noemen. Overigens belooft 6G een nog verdere verbetering van de latency.
Er speelt echter nog iets: het aantal gelijktijdige gebruikers dat bij 4G dan wel 5G mogelijk is. Bij een file op de A2 rijden vele honderden auto’s dicht bij elkaar. Hebben we het over autonoom rijdende auto’s dan hebben deze allemaal een realtime verbinding met hun omgeving nodig. De 200 tot 400 gebruikers die een 4G-cel aan kan, is dan niet voldoende. Bij 5G wordt gewerkt met basisstations die uit kleine cellen zijn opgebouwd. Elke cel kan 100 maal meer gelijktijdige gebruikers aan dan bij 4G haalbaar is. Dus ook in dit opzicht is 5G cruciaal voor autonoom rijden.
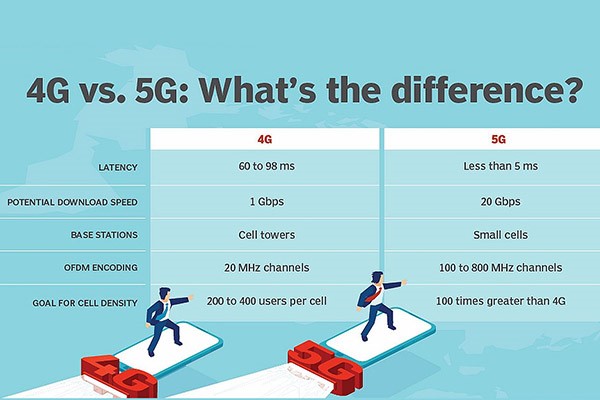 2. De verschillen tussen 4G en 5G.
2. De verschillen tussen 4G en 5G.
Maximum snelheid
Het autonoom rijdende voertuig rijdt zelfstandig rond. Hij scant zelf zijn directe omgeving, wisselt data uit met andere autonome voertuigen en ontvangt van verkeersapplicaties naast de weg en in de cloud aanvullende informatie die hem vertellen hoe zijn omgeving op iets grotere afstand eruitziet (figuur 1). Over wat voor soort informatie hebben we het dan? En zijn de systemen die deze signalen moeten ophoesten wel klaar voor autonoom rijden?
We hebben het hier over tal van verkeers- en andere systemen die we nu ook al op, in en langs wegen tegenkomen. Denk aan matrixborden boven een snelweg die een file aankondigen of de maximum snelheid aangeven. Of de lussen in de weg bij stoplichten. Denk aan systemen die in de winter gladheid aangeven. Of wat te denken van stoplichten die reageren op het verkeersaanbod? Of systemen die een stoplicht op rood zetten als er een tram, bus of ambulance aan komt.
Een autonoom rijdende auto zal met al dit soort systemen moeten kunnen ‘praten’. Deze systemen moeten informatie verzamelen en beschikbaar stellen aan naderende voertuigen in een format die deze auto’s ‘begrijpen’. Dit betekent in de praktijk dat al dit soort systemen zullen moeten worden aangepast, zodat draadloze digitale communicatie mogelijk wordt tussen al die lussen en al die matrixborden en al die regensensoren en dergelijke, en een autonoom rijdende auto. Bij testtrajecten – bijvoorbeeld in Helmond – is dit al gerealiseerd. Maar vooralsnog is het daarbij gebleven. In de rest van Nederland zal dit ook allemaal nog moeten gebeuren.
Het mag duidelijk zijn dat dit een ongekende ‘ombouwoperatie’ betekent. Interessant is bovendien dat we in fases zullen moeten werken. In Nederland wordt weliswaar mondjesmaat getest met peloton rijden (‘platooning’) en autonoom rijden, maar een datum voor het wettelijk op de weg toestaan van level 4 of level 5 autonoom rijdende auto’s is er nog niet. Level 4 is een autonoom rijdend voertuig waarbij de auto vrijwel altijd zelfstandig rijdt, behalve bij slecht weer. Een level 5-auto rijdt altijd zelfstandig.
Dubbele infrastructuur
Zodra de eerste autonoom rijdende auto’s op de weg worden toegelaten, ontstaat een interessante situatie. Op dat moment hebben we namelijk een dubbel uitgevoerde infrastructuur aan verkeersbegeleidende systemen nodig. Natuurlijk kan een autonoom rijdende auto met een camera een matrixbord boven de snelweg scannen en daar snelheidsinformatie uit halen. Dit kost echter tijd, terwijl we eerder hebben gezien dat we bij autonoom rijdende voertuigen moeten werken met een latency van 5 ms of minder. Laten we niet vergeten dat deze zelfstandig rijdende wagen eigenlijk voldoende heeft aan een handvol bits die aangeven dat bijvoorbeeld de snelheid van 100 km/h is teruggebracht naar 70 km/h. Of dat de rechterbaan is afgesloten vanwege een auto met pech.
Auto’s die door mensen worden bestuurd hebben echter visuele matrixborden nodig. We zullen daarbij dus duidelijke keuzes moeten maken: wordt een matrixbord boven de snelweg straks een dubbel uitgevoerd systeem (visueel en data)? Of dient de autonoom rijdende auto het visuele matrixbord als input te gebruiken? Of wordt het wellicht een mix van beide benaderingen? Bijvoorbeeld het ene systeem in steden en dorpen en het andere systeem op snelwegen?
En hoe zorgen we ervoor dat elk verkeersbord en elk stoplicht digitaal moet worden en in staat moet zijn te communiceren? Kiezen we hierbij opnieuw voor 5G? De vraag is ook of we voor een cruciaal onderdeel van de vitale infrastructuur van ons land eigenlijk wel afhankelijk willen zijn van draadloze communicatie? Tussen autonoom rijdende auto’s onderling en tussen autonoom rijdende auto’s en de omliggende systemen kunnen we niet anders. Maar hoe zit het met al die lussen in het asfalt, slagbomen bij overwegen en dergelijke? Gaan we al die systemen voorzien van 5G-zenders en ontvangers? Of gaan we wellicht een aantal locaties toch liever aansluiten op een (glasvezel)verkeersnetwerk?
Op veel vragen over autonoom rijdende voertuigen en hun verkeerstechnische omgeving is nog geen antwoord mogelijk. Toch is een ding erg duidelijk: de geleidelijke overstap van traditioneel rijden naar autonoom rijden wordt een zeer interessante periode.
eCall+ wordt zwarte doos
Sinds 2018 moeten alle nieuwe auto’s die in de EU de weg op gaan van eCall zijn voorzien. Dit is een geautomatiseerd systeem dat bij een ongeval automatisch hulpdiensten alarmeert. eCall+ wordt de opvolger. Deze service zal ook een zwarte doos kennen, waarin de auto continu data wegschrijft over de toestand van de weg, de auto en dergelijke. Dit systeem – of een volgende generatie van dit systeem – zal ook een belangrijke rol spelen bij autonome voertuigen. Hiermee kan veel data worden verzameld over de omstandigheden waaronder zich een eventuele aanrijding of een andere situatie zich voordoet.
Soorten autonoom rijden
Wat verstaan we nu eigenlijk onder autonoom rijden? Op dit moment bestaan een aantal varianten:
- platooning: ‘pelotons’ van vrachtwagens die als een treintje dicht achter elkaar rijden en waarbij – meestal via wifi – de wagens onderling digitaal aan elkaar gekoppeld zijn zodat snelheid, remmen, afslaan en dergelijke onderling worden doorgegeven,
- automatisch rijden over lange afstanden op snelwegen, provinciale wegen met gescheiden rijbanen en op rustige wegen buiten de bebouwde kom,
- automatisch rijden in files,
- automatisch rijden op parkeerterreinen en in parkeergarages (automatic valet parking),
- automatisch rijdende shuttles voor personen- en goederenvervoer met een lage snelheid.
Volledig autonoom rijden is in Europa nog niet mogelijk, mede omdat hiervoor ook nog geen wettelijke regelingen zijn.
Tekst: Robbert Hoeffnagel
Fotografie: iStock, Crow, TechTarget, Fleximo